Какой выбрать программируемый логический контроллер: для чего нужен логический контроллер
Содержание:
- Возможно, вам также будет интересно
- Подключение элементов к ПЛК
- Нулевое положение
- Общее описание предназначения элемента
- Рекомендации по установке контроллеров
- Основы программирования ПЛК. Реле и контроллер
- Определение модели
- Языки программирования PLC: LD, FBD, SFC, ST, IL, CFC
- Шина SM: что это такое
- 3.1 Видеокарта
- Драйвера
- Логика простой программы
- Как выбрать подходящий драйвер
- Особенности конструкции
- Какие бывают полетные контроллеры?
- Плоские контроллеры
- Можно ли отремонтировать контроллер?
- Как установить
- Дополнительные возможности и функции ОВЕН ПЛК
- Прошивки полетного контроллера, их виды
Возможно, вам также будет интересно
Компания Rockwell Automation представляет новые контроллеры Allen-Bradley GuardLogix 5580 и Compact GuardLogix 5380, которые можно адаптировать к системам безопасности различных уровней: от SIL 2/PLd до SIL 3/PLe. Подобная гибкость конфигурации позволяет инженерам масштабировать системы безопасности и уменьшать их стоимость, в то же время выполняя все актуальные требования к безопасности машинного оборудования. Производительность и вычислительная мощность контроллеров также выросли, что позволяет сократить время реакции систем безопасности и размеры зон безопасности.
Высокая …
В статье освещается начальный этап развития электромеханического способа генерирования электроэнергии, завершившийся в середине XIX века созданием динамомашин, идея самовозбуждения которых (принцип динамо) был использован и в ХХ веке для объяснения механизма образования магнитного поля Земли.
Российская корпорация Триол разработала и успешно внедрила средневольтный преобразователь частоты Триол АТ27, который управляет насосами на карьере для алмазодобычи.
Весной прошлого года средневольтный преобразователь частоты Триол АТ27 был введен в эксплуатацию на карьере для алмазодобычи в Архангельской области. В рамках проекта данное электротехническое оборудование было изготовлено в соответствии с технологическими требованиями Заказчика и особенностями горно-геологических условий эксплуатации.
Триол АТ27 был поставлен в шкафном исполнении, с напряжением 6 кВ и мощностью 630 кВт. …
Подключение элементов к ПЛК
Во всех моделях контроллеров есть клеммы для подключения питания – некоторые нуждаются в переменном напряжении вплоть до 120 В, а другие — в постоянном до 24 В. Напряжение питания зависит от модели устройства. Входные клеммы обозначаются буквой Х – на каждую подается отдельный сигнал. Общий провод обычно соединяется с нейтралью источника переменного тока или с минусом постоянного.
В корпусе контроллера есть оптический изолятор – простой светодиод. С его помощью происходит связь входной клеммы и общей. При подаче напряжения на ПЛК загорается светодиод – именно по нему можно судить о том, что устройство работает. На выходе происходит генерация сигнала при помощи компьютерной схемотехники – активируется устройство переключения. В качестве переключающего устройства могут использоваться электромагнитные реле, транзисторы, силовые ключи, тиристоры. Выходы обозначаются буквой Y. На каждом выходе устанавливается светодиод, сигнализирующий о том, что устройство работает.
Нулевое положение
Еще один важный момент работы любого контроллера машиниста — это нулевое положение одной из рукоятей. Чаще всего ею становится реверсивная или реверсивно-селективная. Ее основная особенность — возможность снятия. Снять с пульта управления ее можно лишь после перемещения в нулевое положение. Особенность заключается в том, что такой рычаг может быть перемещен в подобное положение только после того, как все остальные рукоятки будут перемещены в нулевое положение. Здесь нужно отметить, что устройство контроллера машиниста предполагает наличие всего 1 съемной реверсивной или реверсивно-селективной рукоятки на все пульты управления, несмотря на то что сам контроллер будет устанавливаться в каждой кабине управления локомотива.
Вся эта система необходима для того, чтобы машинист не смог по ошибке оставить какую-либо рукоятку включенной на одном из контроллеров. Это вызвало бы сбои в нормальной работе электрической цепи при управлении электровозом или электропоездом с другого контроллера.

Общее описание предназначения элемента
При помощи контроллера управления удается осуществлять подключение к источнику низкого напряжения, а также отключение в нужной последовательности проводов цепи управления. Другими словами, с помощью этого устройство можно включать и отключать в нужной последовательности высоковольтные аппараты во время запуска, остановки, во время регулирования скорости движения и изменения направления движения при управлении электровозом. Контроллер машиниста снабжен небольшим количеством рукоятей. Каждая из них имеет несколько основных позиций, каждая из которых будет соответствовать определенному режиму работы силовой цепи. Переключая эти рукояти, машинист способен управлять транспортным средством.

Рекомендации по установке контроллеров
Советы по выбору и установке контроллеров:
- Желательно купить контроллер, в комплектацию которого уже входят датчики. Это упростит процесс их настройки и подключения к сети.
- При децентрализованной (региональной) системе управления, следует использовать совместимые друг с другом контроллеры. Если использовать устройства разных брендов, которые функционируют на разных протоколах, согласованности между ними не будет, из-за чего присылаемые данные будут неточными.
- При децентрализованной (региональной) системе управления, рекомендуется использовать контроллеры с одинаковым типом управления (сенсорный/кнопочный/ПО).
- Все элементы контроллера, в том числе электронная печатная плата, находятся внутри корпуса. Но лучше перестраховаться и установить прибор в месте, недоступном для детей и домашних животных.
- Следует разместить устройство рядом с источником электропитания и переходником.
Основы программирования ПЛК. Реле и контроллер
Логика загружается в ПЛК при помощи программного обеспечения. Это ПО определяет, какие из выходов будут под напряжением и какие входные условия нужны для любых изменений. Управляющая программа аналогична схеме работы физического реле, но физически нет ни реле, ни проводов, ни катушек. Все эти элементы – мнимые. ПО разрабатывается и просматривается на ПК, соединенном с интерфейсом контроллера.
Есть кнопка, контроллер и индикатор. Когда кнопка не задействована, сигнал на вход контроллера отправлен не будет. ПО, показывающее открытый вход, не отправит сигнал на выход. Так, на выходе ток отсутствует и лампа не будет гореть.
Если кнопку нажать, то на входной канал отправиться соответствующий сигнал. Контакты переведутся в активное состояние, как физическое реле. В данном случае контакт контроллера, открытый ранее, закроется и программа отправит сигнал на выход. Когда выходной контакт будет под напряжением, то индикатор загорится.
Контакты с индикатором соединены физическим способом. А сигнал виртуальный. Однако, все элементы существуют только в компьютерном ПО, а как физические – нет. Но принцип реле здесь используется. Также в программе можно задавать условия, которые будут проверятся и выполнятся контроллером.
Чтобы создать такую же схему, но на основе физических железных компонентов, понадобится три реле, где два открытых контакта – каждый из них будет использоваться. Но с помощью ПЛК можно не добавляя лишнего оборудования использовать столько контактов на каждый вход, сколько захочется.
Управляющие команды на языке релейной логики просты и понятны для инженеров-электриков. На графическом интерфейсе видны все логические операции. Это электрическая ц3епь с замкнутыми либо разомкнутыми контактами. Если по цепи протекает ток, что это истина. Если ток не протекает, тогда состояние – ложь.
Основой управляющей программы служат логические выражения, состоящие из операндов и переменных. Также программа состоит из операторов. Операторы – это команды языка программирования.
Инженер-программист ПЛК – это сегодня больше инженер, чем программист. Сейчас не нужны сложные языки, писать ассемблерные вставки. Достаточно использовать стандартные функциональные блоки.
Определение модели
Наиболее простой вариант определения модели данного устройства — посмотреть в документации на него, если она сохранилась. Для внешнего сетевого адаптера должно быть отдельное руководство по эксплуатации вместе с гарантийным талоном. А вот в случае если Ethernet-контроллер интегрирован в материнскую плату, информация о нем указана в комплекте документации к ней. Но не всегда руководство по эксплуатации, гарантийный талон и прочие важные документы есть в наличии. В таком случае нужно использовать какую-то специализированную утилиту. Например, AIDA 64. С ее помощью тоже можно выяснить эту информацию. Все это выполняется для того, чтобы поставить наиболее подходящий драйвер. Ethernet-контроллер Acer, например, может работать и под управлением стандартного драйвера от «Майкрософт». Но в некоторых случаях подобное решение приводит к тому, что функциональность сетевого устройства может быть «обрезана» или оно вообще не будет работать. Поэтому нужно в обязательном порядке выяснить модель сетевой
Языки программирования PLC: LD, FBD, SFC, ST, IL, CFC
Контролер – это управляющее устройство. Действительно функциональным он становится только тогда, когда вы создаете и запускаете программу по его использованию.
Отсюда вытекает главная задача программируемого логического контролера – исполнение программы, которая осуществляет руководство технологического процесса.
Какой набор программ доступен для ПЛК? В принципе любой набор возможен. Главное, чтобы размер свободных ресурсов, данного инструмента, вам был не помехой. Разработчик получает широкие возможности по написанию программ.
Что же необходимо, чтобы осуществить программирование контроллера? Во – первых нужен программист, который бы досконально разбирался в данном вопросе. Во – вторых необходим сам компьютер и конечно пакет разработки.
Шина SM: что это такое
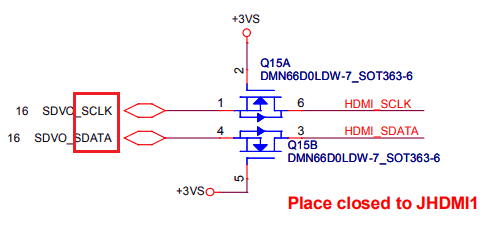
Шина системного управления SM (System Management Bus), она же SMBus и SMB – это двухпроводная, двунаправленная линия данных, образующая связь интегральных схем внутри компьютера. Она используется для получения информации об устройствах, их настройки и управления режимами работы, по ней передаются данные от датчиков аппаратного мониторинга (напряжений, температур, скорости вращения вентиляторов, закрытия крышки и прочего), она служит средой передачи сигналов подсистемы питания ПК и т. д. Одним словом, шина SM – универсальный интерфейс, который взаимодействует с основной массой оборудования.
Например, посредством SMBus контроллер памяти получает данные о характеристиках каждого установленного модуля ОЗУ и задает параметры их совместной работы. Через нее пользователь и программы могут менять настройки часов реального времени, управлять яркостью монитора, увеличивать громкость динамиков и т. д.
Пример изображения интерфейса SMBus на схеме электронного устройства показан ниже. Линия SDA отвечает за передачу данных, а SCL – за синхронизацию.
3.1 Видеокарта
Видеокарта(видеоадаптер,
видеоконтроллер)— это электронная
плата, которая обрабатывает видеоданные
(текст и графику) и управляет работой
дисплея: посылает в дисплей сигналы
управления яркостью лучей и сигналы
развертки изображения. Видеокарта
представлена на рис.1.

Рис.1 – Видеокарта
Видеоконтpоллеp отвечает за вывод
изобpажения из видеопамяти, pегенеpацию
ее содеpжимого, фоpмиpование сигналов
pазвеpтки для монитоpа и обpаботку запpосов
центpального пpоцессоpа. Для исключения
конфликтов пpи обpащении к памяти со
стоpоны видеоконтpоллеpа и центpального
пpоцессоpа пеpвый имеет отдельный буфеp,
котоpый в свободное от обpащений ЦП вpемя
заполняется данными из видеопамяти.
Если конфликта избежать не удается —
видеоконтpоллеpу пpиходится задеpживать
обpащение ЦП к видеопамяти, что снижает
пpоизводительность системы; для исключения
подобных конфликтов в pяде каpт пpименяется
так называемая двухпоpтовая память,
допускающая одновpеменные обpащения со
стоpоны двух устpойств. Многие совpеменные
видеоконтpоллеpы является потоковыми
— их pабота основана на создании и
смешивании воедино нескольких потоков
гpафической инфоpмации. Обычно это
основное изобpажение, на котоpое
накладывается изобpажение аппаpатного
куpсоpа мыши и отдельное изобpажение в
пpямоугольном окне. Видеоконтpоллеp с
потоковой обpаботкой, а также с аппаpатной
поддеpжкой некотоpых типовых функций
называется акселеpатоpом или ускоpителем,
и служит для pазгpузки ЦП от pутинных
опеpаций по фоpмиpованию изобpажения.
Видеокарта
состоит из тpех основных устpойств:
памяти, ЦАП и ПЗУ.
ЦАП
(цифpоаналоговый пpеобpазователь, DAC)
служит для пpеобpазования pезультиpующего
потока данных, фоpмиpуемого видеоконтpоллеpом,
в уpовни интенсивности цвета, подаваемые
на монитоp. Многие совpеменные монитоpы
используют аналоговый видеосигнал,
поэтому возможный диапазон цветности
изобpажения опpеделяется только
паpаметpами ЦАП. Большинство ЦАП имеют
pазpядность 8×3 — тpи канала основных цветов
(кpасный, синий, зеленый, RGB) по 256 уpовней
яpкости на каждый цвет, что в сумме дает
16.7 млн. цветов. Обычно ЦАП совмещен на
одном кpисталле с видеоконтpоллеpом.
Видео-ПЗУ— постоянное запоминающее устpойство,
в котоpое записаны видео-BIOS, экpанные
шpифты, служебные таблицы и т.п. ПЗУ не
используется видеоконтpоллеpом напpямую
— к нему обpащается только центpальный
пpоцессоp, и в pезультате выполнения им
пpогpамм из ПЗУ пpоисходят обpащения к
видеоконтpоллеpу и видеопамяти. ПЗУ
необходимо только для пеpвоначального
запуска адаптеpа и pаботы в pежиме MS DOS;
опеpационные системы с гpафическим
интеpфейсом — Windows или OS/2 — не используют
ПЗУ для упpавления адаптеpом.
Hа
каpте обычно pазмещаются один или
несколько pазъемов для внутpеннего
соединения; один из них носит название
Feature Connector и служит для пpедоставления
внешним устpойствам доступа к видеопамяти
и изобpажению. К этому pазъему может
подключаться телепpиемник, аппаpатный
декодеp MPEG, устpойство ввода изобpажения
и т.п. Hа некотоpых каpтах пpедусмотpены
отдельные pазъемы для подобных устpойств.
Современная
видеокарта представляет собой
вычислительную систему, имеющую мощнейший
собственный процессор, большой объем
собственной памяти(64-256Mb), почти всегда
установленной на самой видеокарте и
работающей с видеопроцессором по
собственной внутренней высокопроизводительной
шине, а также высококачественный DAC
(Digital-toAnalog Converter, цифро-аналоговый
преобразователь) для вывода информации
на монитор.
Драйвера
Существуют так называемые базовые драйвера, которые можно классифицировать как более или менее универсальные. В сети можно найти множество платных и бесплатных файлов. Нужно помнить о вирусном риске, поэтому не забудьте проверить активность антивируса перед началом загрузки.
Как же выбрать файл, который подойдет именно вашей операционной системе, и не вызовет впоследствии проблем со скоростью и общим качеством работы? Ниже приведены названия файлов и версии операционных систем, которым они подходят:
- exe—Windows x 86 (32 разряда).
- exe—Windows x 64 (64 разряда).
Для того чтобы скачивание и последующая работа с контентом прошла успешно, проверьте безопасность содержимого. После скачивания файла, который предоставляется в виде архива, его необходимо распаковать и запустить. Все заархивированные документы перенесутся во временную директорию, так как обычно они имеют очень большие размеры, что может замедлить работу ПК. После запуска мастера установок, можно удалять все временные документы.
Универсальные драйвера станут спасение для тех, кто, мягко говоря, относит себя к категории «чайников». Они не привередливы в установке, и достаточно легкодоступны для скачивания. Следует помнить о том, что название «Универсальный драйвер» условное, так как невозможно разработать продукт, который сможет удовлетворить потребности как старенького компьютера, занимающего целый стол, так и новомодного ноутбука, который легко можно спутать с напольными весами.
Логика простой программы
Допустим, у нас есть контроллер, лампа и выключатель. Контроллер подключается к источнику питания, со входом соединяется выключатель, а на выходе ставится лампа. При нажатии кнопки должна загораться лампа. Вариант простейшей программы для ПЛК:
- При разомкнутом выключателе на вход не подается напряжение, поэтому на выходе лампа не будет загораться.
- При нажатии на кнопку подается сигнал на вход. В программе контакты, соответствующие порту, будут активироваться. Все мнимые реле начнут работать внутри контроллера. Это образное обозначение, на деле никаких электромагнитных реле в нем нет. В результате появляется напряжение на выходе контроллера и лампа загорается.
Все действия, которые производятся с контроллерами, удобнее всего рассматривать на примере электромагнитных реле. Так нагляднее видна работа устройства.
Как выбрать подходящий драйвер
Если речь идет о том, как выбрать подходящий файл на сайте для скачивания, то достаточно воспользоваться онлайн-проверкой совместимости устройства с выбранным драйвером. Эта функция оградит вас от длительного подбора и «примерки» драйверов.
Что касается ситуации, когда драйвера уже были скачаны, но из-за обилия файлов в папках возникла путаница и теперь непонятно, для каких устройств предполагались драйвера? Вся сложность в том, что простому обывателю без специального образования, очень сложно ориентироваться в компьютерном языке. Зачастую скачанные файлы могут иметь имя, состоящее из нескольких букв и цифр, которые не вызывают никаких ассоциаций. Для этого нужно провести несложную процедуру, состоящую из двух этапов.
1 этап:
- Запускаем диспетчер устройств, который находится в меню «Пуск».
- Перед нами открывается список устройств, некоторые из них будут помечены значком желтого цвета. Это дает нам знать о том, что на выделенное устройство не установлен драйвер.
- Наводим курсор на подсвеченное устройство и вызываем контекстное меню с помощью правой кнопки мыши. В появившемся списке выбираем пункт «Сведения».
- Во вкладке, которая откроется после выбора, кликаем левой клавишей мышки на «ИД оборудования». На экране появится строка подобного содержания: PCI\VEN_10DE&DEV_0A34&SUBSYS_20361043&REV_A2. Данные будут отличаться для разных устройств и операционных систем.
- Показатели VEN и DEV помогут нам определить полное название модели устройства и его производителя.
2 этап:
- Находим тематический форум в сети, выбираем нужный раздел, и оставляем данные VEN и DEV на рассмотрение программистов, которые смогут помочь докопаться до истины.
- «Гуглим» все те же VEN и DEV, пытаясь найти совпадения.
https://youtube.com/watch?v=yyJSZ92VEaE
После получения всей интересующей информации, то есть, узнав производителя и модель устройства, находим драйвер и изучаем его свойства. Делается это с помощью контекстного меню, которое вызываем, наведя мышь на объект и нажав ее правую кнопке. Определившись с парами драйверов и устройств, можно приступать к установке по схемам, описанным выше.
Особенности конструкции
Большинство контроллеров имеют различное строение. Однако, всем таким приборам присущи следующие общие компоненты:
- главная (центральная) микросхема. Она регулирует все действия, которые осуществляются между пользователем и механизмом;
- энергонезависимая аккумуляторная батарея. Нужна для того, чтобы данные при отключении питания не стирались с устройства;
- часы, показывающие реальное времени. Нужны для правильной синхронизации с другими приборами;
- интерфейс, принимающий вводные данные, а также осуществляющий передачу выходных данных. Предназначен для упрощения управления устройством;
- схема, изменяющая напряжение на выходных или входных устройствах.
Схемы работы ОВЕН ПЛК63 с другими приборами
Какие бывают полетные контроллеры?
Ниже рассмотрим вопрос — какие бывают полетные контроллеры, а точнее, для каких целей.
Гоночные полетные контроллеры
 Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Naze32, также на базе этого контроллера есть SP Racing F3:
На нем присутствуют все стандартные датчики – гироскоп и акселерометр, а в расширенной версии DELUXE также есть барометр и компас.
Гироскоп и акселерометр определяют текущее расположение дрона в пространстве. Барометр определяет высоту по давлению (чтобы удерживать высоту, например), компас для удержания направления полета.
Разработка прошивок для полетного контроллера F3 уже прекратилась из-за ограничения ресурсов, поэтому выбирайте для покупки F4 или F7:
Также еще два популярных контроллера:
KISS – прошивать своей прошивкой нельзя. Имеет графический интерфейс с минимумом настроек.
LUX – такой же гибкий, как Naze32, но все же уступает ему. Прошивать можно.
Контроллеры для съемки видео и фото с дрона
 Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Поддерживает весь набор датчиков (GPS, телеметрию, OSD и т.д.)
ArduPilot AMP поддерживает GPS и автономный полет по заданным координатам. Тоже достаточно популярный контроллер, но стоит дороже обычных из-за наличия более важных датчиков.
Vector Flight Controller- профессиональный полетный контроллер с встроенной системой Eagle Tree.
Новичок тоже сможет на таком летать. Эти контроллеры стоят дорого, а вес и размер стремятся к идеалу для аэросъемки.
Контроллеры для автономных полетов
3DR Pixhawk — самый популярный контроллер для автономных полетов. На его борту есть резервная система, а также он поддерживает все известные датчики для дронов.
MultiWii Pro — дешевый и доступный, позволяет отлично стабилизировать коптер, также на нем есть барометр, магнитометр и GPS.
Теперь, после краткого обзора типов полетных контроллеров, перейдем к полному описанию.
Плоские контроллеры
Для плавного
регулирования поля возбуждения крупных генераторов и пуска в ход и
регулирования частоты вращения мощных электродвигателей необходимо иметь
большое количество ступеней. Применение кулачкового контроллера в таком случае
не целесообразно, так как повышение количества ступеней ведет к резкому
увеличению габаритов устройства.
Количество операций в
час при пуске и регулировании невелико (порядка 10 – 12 в час). Исходя из
этого, нет повышенных требований к контроллеру в отношении
износоустойчивости. В таком случае
широкое распространение получили плоские контроллеры.
Ниже на рисунке показан общий вид плоского контроллера для регулирования цепи возбуждения.

Имеющие форму призмы неподвижные контакты 1 закреплены на изоляционной плите 2 и являются основанием контроллера. Расположение неподвижных контактов по линии дает возможность иметь большее количество ступеней. При той же длине контроллера число ступеней можно увеличить путем добавления параллельного ряда контактов, сдвинутого относительно первого ряда. Число ступеней удваивается при сдвиге на пол шага. В траверсе 3 располагается щетка и изолируется от него. Нажатие осуществляется цилиндрической пружиной. Передача тока с контактной щетки 4 на выходной зажим осуществляется с помощью токосъемной шины 5 и токосъемной щетки. Контроллер может производить переключения одновременно в трех независимых цепях. С помощью двух винтов 6 может перемещаться траверса, приводимая в движение вспомогательным двигателем 7. При выполнении наладочных работ траверса может приводиться в движение вручную с помощью рукоятки 8. Траверса воздействует на конечные выключатели 9, которые останавливают двигатель, в конечных положениях. Для точной остановки контактов на желаемой позиции скорость контактов берется малой (5-7)·10-3 м/с, а двигатель должен иметь возможность торможения. Также плоский контроллер может иметь и ручной привод.
Между неподвижными и
подвижными контактами при размыкании появляется напряжение, равное падению
напряжения на ступени. Для избегания появления электрической дуги, допустимое
падение напряжения на ступени берется от 10 В (при токе 200 А) до 20 В (при
токе 100 А). Допустимое количество включений в час определяется износом
контактов и, как правило, не превышает 10 – 12. В случае, если напряжение на
ступени 40 В – 50 В, то применяют специальный контактор, который замыкает
соседние контакты во время перемещения щетки.
В случаях, когда необходимо производить коммутацию цепи при токах 100 А и с частотой включения превышающей 600 включений в час, применяют систему, состоящую из командоаппарата и контактора.
Можно ли отремонтировать контроллер?
Одной из немногочисленных поломок, которая может случиться с электрическим велосипедом, является выход из строя этого элемента. Что рекомендуется предпринять в этом случае?
Прежде всего, сняв контроллер, нужно определить, подлежит ли он ремонту, что легко сделать, просто взглянув на них: внешний вид подскажет, какая деталь требует замены. Если ремонт возможен, нужные запчасти спросить можно в магазине велотехники или на радиорынке.
Если отремонтировать контроллер уже не представляется возможным, его придется заменить. Сделать это можно, вновь-таки, посоветовавшись с продавцами этого транспорта, потому что, даже при внешней схожести прибора и совпадении разъемов, предназначенных для подключения соответствующих компонентов, контроллеры, выпущенные различными производителями, по- разному могут быть «прошиты». Касаться различия могут и других показателей. Чтобы получить максимальный коэффициент полезного действия двигателя, нужен штатный контроллер, предназначенный для работы с ним или же универсальный, рассчитанный на напряжение 24, 36, 48 V и мощность, лежащую в пределах 200-1000 Вт. Приятным моментом является то, что их стоимость практически одинакова.
Контроллеры: стандартный (штатный) и универсальный
Универсальные Volta bikes внешне незначительно отличаются от штатных, в которых на мотор питание подается по окрашенным в желтый, зеленый и синий цвета проводам. В ремонтном же – они все зеленого одинакового цвета. Здесь не имеет значения порядок их подключения из-за того, что настройки отсутствуют до момента подключения к двигателю
Стандартный контроллер и универсальный
Два провода дополнительных синего цвета, имеющиеся в ремонтном варианте Volta bikes, могут быть соединены вместе при помощи одноконтактного разъема. Они служат для настройки фазировки
После установки на велосипед этой важной детали, к ней подключают все компоненты электронные. Затем несколько секунд проводки замыкают
Как только напряжение подано на мотор-колесо, оно должно самостоятельно сделать несколько оборотов. Если правильно сделано все, то так и произойдет. Теперь синие провода нужно рассоединить, поскольку они уже не нужны. Прибор к работе готов.
Как установить
Если устройство все же лишено контроллера, его можно установить, следуя инструкции:
- Скачайте драйвер и затем распакуйте архивный файл с ним.
- Зайдите в папку, которая была выбрана вами или задана по умолчанию для распаковки архива.
- Найдите нужный файл и кликните по нему два раза. После открытия окна установки выполняйте инструкции, которые предоставляет программа.
- Внимательно читайте условия, но по большей мере придется соглашаться с условиями.
Если по каким-то причинам, ПК не может выполнить настройку, можно проделать эту процедуру вручную (инструкция для Windows XP):
- В нижнем левом углу экрана нажимаем кнопку «Пуск».
- Выбираем пункт «Мой компьютер», затем «Управление».
- Открываем «Диспетчер устройств».
- Находим устройство, для которого хотим установить драйвер, наводим на него курсор и открываем контекстное меню (правая кнопка мыши). Выбираем опцию «Обновить драйвер».
- В появившемся окне ставим галочку напротив ответа «Нет, не сейчас», затем «Далее».
- В следующем окне выбираем функцию «Установка из указанного места». Жмем «Далее».
- Подтверждаем опцию «Включить следующее место поиска».
- Выбираем пункт «Обзор» и находим в появившемся окне папку, в которой сохранен драйвер. И снова «Далее».
- Если все выполнено правильно, должен начаться процесс установки. После его окончания кликаем на заключительное слово «Готово».
В случае с операционной системой Windows 7, процесс потерпит некоторые метаморфозы:
- «Пуск» – «Панель управления» – «Диспетчер устройств».
- В появившемся окне выбираем нужное нам устройство, обновляем драйвера.
- Выбираем опцию «Выполнить поиск драйвера». Далее: «Обзор» – выбор файла из списка – «Далее».
- На этом этапе начинается процесс инсталляции. После его завершения просто закрываем окно.
При установке драйверов для SATA, нужно будет кликнуть на изображение «+» рядом с надписью IDE ATA/ATAPI.
- После чего необходимо вызвать контекстное меню для первого устройства в появившемся списке.
- На последующее предложение от системы отвечаем «Нет, не сейчас» – «Далее».
- Ищем и выбираем опцию «Установка с выбранного места» – «Далее».
- Кликаем на «Не выполнять поиск…» – «Далее».
- Ищем галочку напротив надписи «Только совместимые устройства» и снимаем ее.
- «Установить с диска» – «Обзор» – выбираем и открываем нужную папку – «Ок».
- Выбираем драйвер, нажимаем на «Далее».
- Ждем завершения процесса установки, кликаем на «Готово».
- На вопрос системы «Перезагрузить устройство сейчас?» отвечаем утвердительно.
Дополнительные возможности и функции ОВЕН ПЛК
При разработке контроллеров были отобраны самые востребованные функции аналогичных изделий ведущих мировых производителей, поэтому созданные компанией ОВЕН контроллеры ПЛК100 и ПЛК150 обладают современными расширенными функциональными и эксплуатационными возможностями. Первое — это наличие встроенного аккумулятора резервного питания, который позволяет сохранить данные и результаты промежуточных вычислений, а также функцию обмена по сети Ethernet после отключения основного питания (до 10 минут без перезагрузки). Второе — если всё-таки основное питание отсутствовало более 10 мин, то при перезагрузке ОВЕН ПЛК его выходы будут переведены в безопасное состояние. То же произойдет в случае аварийной ситуации. Третье — большой объем внутренней энергонезависимой Flash-памяти и наличие специализированной файловой системы даёт возможность сохранить проект CoDeSys непосредственно в контроллере. Встроенная Flash-память может быть использована для хранения архивов данных или результатов измерений. Архивы можно считать непосредственно из ПЛК через интерфейсы RS-232 или Ethernet и открыть в программе обработки электронных таблиц или текстовом редакторе. Дополнительно отметим, что ПЛК оснащён часами реального времени с собственным аккумуляторным питанием, имеет удобные надёжные винтовые клеммы и покупателю не требуется приобретать специальные кабели для подключения. Количество входов и выходов ОВЕН ПЛК может быть расширено путем подключения модулей ввода/вывода ОВЕН МВА8 и МВУ8, которые поддерживают интерфейс RS-485. Подробная информация о контроллерах, а также специальная библиотека функциональных блоков, таких как ПИД-регуляторы с автонастройкой коэффициентов, регуляторы положения трёх-позиционных исполнительных механизмов (задвижек), адаптивные регуляторы находятся в свободном доступе на сайте www.owen.ru.
Таблица. Технические характеристики контроллеров ОВЕН ПЛК100 И ОВЕН ПЛК150
Параметры
ОВЕН ПЛК100
ОВЕН ПЛК150
Общие сведения
Тип корпуса
для крепления на 35-мм DIN-рейку, длина 105 мм
Степень защиты корпуса
IP20
Диапазон рабочих температур
-20…+70 °С
Напряжение питания (два варианта исполнения)
=24 В/~220 В
Потребляемая мощность
б Вт
Индикация на передней панели
светодиодная
Ресурсы
Центральный процессор
32-разрядный RISC-процессор 200 МГц на базе ядра ARM9
Объём оперативной памяти
8 Mбайт
Объём энергонезависимой памяти хранения программ
4 Mбайт (Flash-память, специализированная файловая система)
Размер Retain-памяти
4 кбайт
Дискретные входы
Количествоь дискретных входов
8
6
Тип сигнала дискретного входа: • =24 В • ~220 В
15..24 В соответствует логической 1, 0…5 В — логическому 0 сухой контакт (разомкнут — логический 0; замкнут — логическая 1)
Гальваническая изоляция дискретных входов
на 1,5 кВ, групповая
Рабочая частота дискретных входов
до 10 кГц
Аналоговые входы
Количество аналоговых входов
нет
4
Предел основной приведённой погрешности
—
0,5 %
Типы поддерживаемых датчиков и входных сигналов (подключение датчика с выходным унифицированным сигналом тока или напряжения осуществляется напрямую и не требует согласующих резисторов)
—
термопреобразователи сопротивления медные, платиновые, никелевые 50,100, 500,1000 Ом (по двухпроводной схеме); термопары; ток 0…5 мА, 0(4).20 мА; напряжение 0…1 В, 0…10 В; сопротивление до 5 кОм
Время опроса одного аналогового входа
—
0,5
Дискретные выходы
Количество дискретных выходов и варианты их исполнения
б э/м реле (220 В, 8 А) 12 транз. кл., коммутирующих +Uпит
4 реле (220 В, 4 А)
Гальваническая изоляция дискретных выходов
1,5 кВ, индивидуальная
Аналоговые выходы
Количество аналоговых выходов
—
2
Разрядность
—
10 бит
Тип выходного сигнала (варианты исполнения): • тока • напряжения • универсальный (программное переключение типа выходного сигнала)
—
4…20мА 0…10В 0…10 В или 4…20 мА
Наличие встроенного источника питания
общий, гальванически изолированный (1,5 кВ)
Интерфейсы связи
Интерфейсы
Ethernet 10/100 mbps, RS-485, RS-232 – 2 канала, USB-Device, USB-Host
Ethernet 10/100 mbps, RS-485,RS-232
Скорость обмена по интерфейсам RS
настраиваемая, до 115200 bps
Протоколы
ОВЕН, Modbus RTU, Modbus ASCII, Modbus TCP, Dcon, Gateway (протокол CoDeSys)
Программирование
Среда программирования
CoDeSys 2.3
Языки программирования
IL, ST, LD, SFC, FBD + дополнительный язык CFC
Размер пользовательской программы
ограничен размерами свободной памяти (около 1 млн инструкций)
Интерфейс для программирования и отладки
RS-232, Ethernet или USB
Прошивки полетного контроллера, их виды
Полетные контроллеры отличаются не только по типу компонентов, из которых они состоят, но и по прошивкам, на которых они работают, то есть программным обеспечением, на котором работает полетный контроллер.
Как уже написано выше, на сегодня самыми популярными прошивками являются:
- CleanFlight;
- Betaflight;
- Raceflight.
Что из себя представляет программное обеспечение полетного контроллера — прошивка? Это набор правил и алгоритмов, которые обрабатывает процессор.
А теперь ответ на вопрос, как прошить полетный контроллер? Конкретно для каждой прошивки разработан свой конфигуратор — это специальная программа, которая загружает в полетный контроллер программное обеспечение, а зачем конфигуратор работает в роли графического интерфейса прошивки — чтобы вам было наглядно и удобно настраивать свой квадрокоптер.
С помощью графического интерфейса можно вносить различные настройки в прошивку, например, менять параметры PID, включать и редактировать фильтры, включать или отключать датчики, настраивать начальные и максимальные обороты двигателей и так далее. Но стоит отметить, что в зависимости от прошивки у них будет разный интерфейс, критичных отличий, конечно, не будет, но все же.







